











 수량을 선택해주세요.
수량을 선택해주세요.


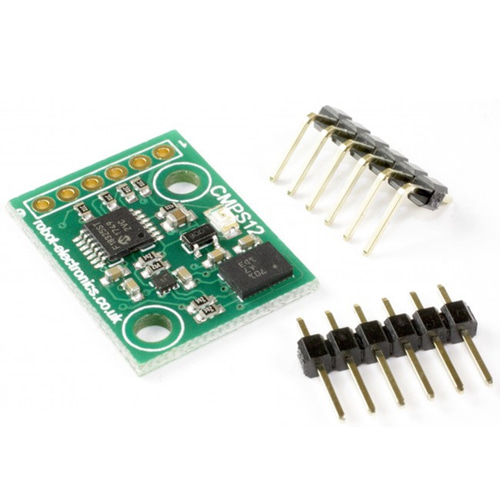
기울기 보정된 컴파스 센서 -칼만 필터 적용
(CMPS12 - Tilt compensated compass)
개요
- 본 제품은 기울기 보정된 컴파스 센서입니다.
- 3축 지자계, 3축 자이로, 3축 가속도 센서가 결합되어 있으며, 칼만 필터로 자이로와 가속도센서를 결합하여, PCB가 기울어짐에 의해 발생하는 에러를 제거하였습니다.
- CMPS12은 0에서 255 혹은 0에서 359.9까지를 의미하는 0-3599까지의 값을 출력합니다.
- 자기장의 x,y,z 콤포넌트, 피치, 롤을 측정하는 세 센서의 출력은 나침반의 방향을 계산하는데 사용이 됩니다.
- 3.3-5V 전원으로 동작하며, 신호레벨은 3.3V입니다. 약 18mA의 전류를 소비합니다.
- 시리얼이나 I2C 인터페이스를 제공합니다.
- 기존의 어떤 센서보다 훌륭한 성능을 보여주는 센서입니다.
특징
- 4th generation tilt compensated compass, powered by the Bosch BNO055, delivering better performance than ever!
Power - 3.3v-5v 18mA Typ.
Resolution - 0.1 Degree
Accuracy - Better than 1%. after calibration
Signal levels - 3.3v, 5v tolerant
I2C mode - up to 400khz
Serial mode - 9600, 19200, 38400 baud
문서
-
Full Technical Data
We also have a free design for a 3d printed tower here
Examples:
I2C bus tutor - general I2C guide
Arduino - I2C interface or a serial interface and displaying data via the serial monitor
ATMEGA32 - reading the result and displaying on a LCD03/LCD05
PIC18F4410 - reading the result and displaying on a LCD03/LCD05
PIC24FJ16GA002 - reading the result and displaying on a LCD03/LCD05
Picaxe18x - I2C communication example
Raspberry Pi - using I2C communication























