













 수량을 선택해주세요.
수량을 선택해주세요.


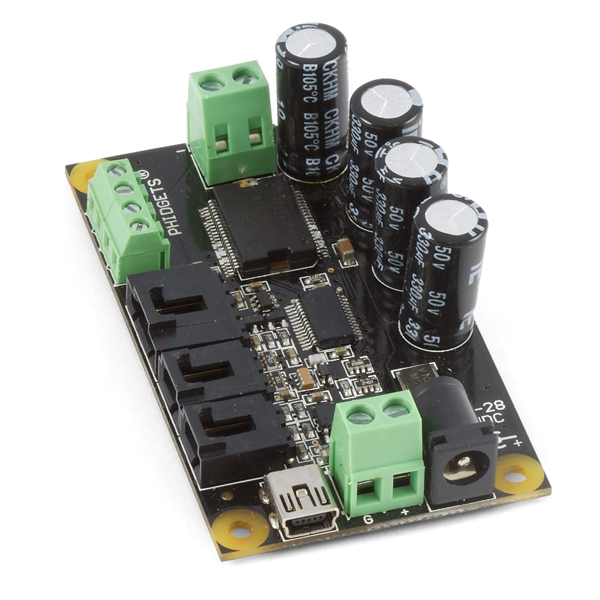
모터 USB 컨트롤러
(PhidgetMotorControl 1-Motor)
개요
- 본 제품은 하나의 DC 모터를 속도, 방향, 가속을 제어할 수 있는 USB 모터 컨트롤러 보드입니다.
- 9-28VDC의 전원으로 동작하며, 양방향으로 두개의 모터 제어가 가능합니다.

- The 1065 lets you control the direction, velocity and acceleration of one DC Motor. The motor is powered by an external power supply (9 to 28VDC).
Brushed DC Motors are very simple to understand, but very difficult to control precisely. By applying a voltage, or pulsing a voltage rapidly, at the terminals of the motor, current flows through the motor, and it will begin rotating. Depending on the direction of the current, the motor will rotate clockwise or counterclockwise. The 1065 changes the effective voltage by changing the percentage of time the full supply voltage is applied to the motor. By switching the voltage very quickly (a technique called PWM), the controller is made smaller, more efficient, and cheaper.
Rough control of actual motor speed can be achieved automatically in software by using the Back EMF property, or current sensing.
Precise control of DC motors can be achieved by using encoders. You can implement control loops through software by using the data provided by the on-board digital inputs, analog inputs and encoder input. There is an event that triggers every 16 ms that returns the back-EMF value for the attached motor, which can be very useful for PID control. For more information, see the API in the User Guide.
The 1065 also provides over-current, over-voltage, and over-temperature protection to insure that the board and motor is not damaged.

특징
-
Controller Properties
API Object Name MotorControl Motor Type DC Motor Number of Motor Ports 1 Velocity Resolution 0.39 % Duty Cycle Acceleration Resolution 24.5 % Duty Cycle/s Acceleration Min 24.5 % Duty Cycle/s Acceleration Max 6250 % Duty Cycle/s Acceleration Time Min 31.3 ms Acceleration Time Max 8.2 s
Encoder Interface
Number of Encoder Inputs 1 Count Rate Max 500000 cycles/s Encoder Interface Resolution x1 Update Rate 125 samples/s Time Resolution 0.33 ms Encoder Input Low Voltage Max 800 mV DC Encoder Input High Voltage Min 2.1 V DC Encoder Pull-up Resistance 2.4 kΩ
Electrical Properties
Supply Voltage Min 9 V DC Supply Voltage Max 28 V DC Continuous Motor Current Max 5 A Overcurrent Trigger 8 A Current Consumption Min 20 mA Current Consumption Max 100 mA USB Speed Full Speed
Physical Properties
Recommended Wire Size (Power Terminal) 12 - 24 AWG Operating Temperature Min 0 °C Operating Temperature Max 70 °C
Analog Inputs
Number of Analog Inputs 2 Input Impedance 900 kΩ 5V Reference Error Max 0.5 % Update Rate 125 samples/s
Digital Inputs
Number of Digital Inputs 2 Pull-up Resistance 15 kΩ Low Voltage Max (True) 800 mV DC High Voltage Min (False) 2.1 V DC Low Voltage Trigger Length Min 4 s High Voltage Trigger Length Min 16 s Digital Input Voltage Max ± 15 V DC Digital Input Update Rate 125 samples/s Recommended Wire Size 16 - 26 AWG -
Comes Packaged with
- A 3018 - Mini-USB Cable 180cm
- A hardware mounting kit (4 nuts and bolts (M3), 4 plastic spacers)
문서
- User Guide
- DC Motor and Controller Primer
- Motor Selection Guide
- Analog Input Primer
- Digital Input Primer
- Encoder Primer
- Mechanical Drawings
- Download 3D Step File
- Programming Resources
-
Code Samples For This Product























