













 수량을 선택해주세요.
수량을 선택해주세요.


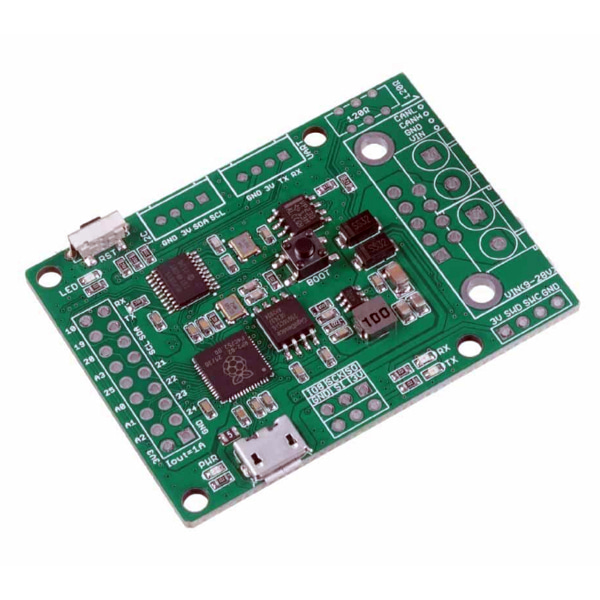
CANBed 아두이노 CAN 버스 RP2040 보드
(CANBed - Arduino CAN-Bus RP2040 Board)
개요
- 본 제품은 CANBed 아두이노 CAN 버스 RP2040 보드 입니다.
- RP2040 칩을 기반으로 디자인된 CAN 통신 보드로 MCP2515 CAN 컨트롤러 칩과 MCP2551 CAN 리시버 칩을 장착하고 있습니다.
- CAN 인터페이스로 4핀 터미널블럭 커넥터나 DB9 커넥터를 장착하여 사용할 수 있습니다.
특징
- Powerful Raspberry Pi RP2040 processor
- Implements CAN V2.0B at up to 1 Mb/s
- Industrial standard 9 pin sub-D connector or 4PIN Terminal.
- OBD-II and CAN standard pinout selectable at the sub-D connector
- 2x4Pin Connector compatible with Grove system from Seeedstudio
- SPI Interface
- Standard (11 bit) and extended (29 bit) data and remote frames
- Power input from 9-28V
-
Parameter Value MCU RP2040 Clock Speed flexible clock running up to 133 MHz Flash Memory 2MB RAM 264KB Operate Voltage 9-28V Output Current @ 3.3V 1A Input Interface sub-D -
The CANBed RP2040 version has been changed from V1.0 into V1.1. For further information, please check here.
CANBed RP2040 is a CAN Bus development board equipped with an RP2040 chip with a high-performance MCP2515 CAN controller and MCP2551 CAN receiver operating at CAN2.0 protocols in 133MHz. The board contains a flexible CAN interface where it can be used 4-PIN Terminal or D89 connector. D89 connector can be directly used as OBD-II mode by default and the hardware can be configured as CAN Open mode as well. Additionally, it has a rich interface in which there is a Micro USB connector that can be programmed instead of supplying power. It also has I2C, UART, SPI, 3 analog input interfaces, and 8 digital IO with 2MB of Flash and 264KB of RAM which make it suitable for most embedded applications.
If you want to use this board to develop OBD-related applications, click to get a DB9 to OBD-II cable.
We use a flexible way for the CAN interface. You can use 4PIN Terminal or DB9 connector. DB9 connector uses OBD-II mode by default. You can also configure CAN Open mode on the hardware. The voltage input range of the CAN interface is 9-28V, which can provide a stable 3.3V/1A output.
Hardware Pinout

1. GPIO - 9x2 I/O Pin OUT:
2. Micro USB connector for programming
3. SPI Interface
4. CAN RX/TX Indicator
5. DB9 connector or Terminal for CAN Bus
6. Switch for the 120Ω terminal resistor for CAN Bus
7. Grove connector for UART
8. Grove connector for I2C (Wire1)
9. Reset























