











 수량을 선택해주세요.
수량을 선택해주세요.








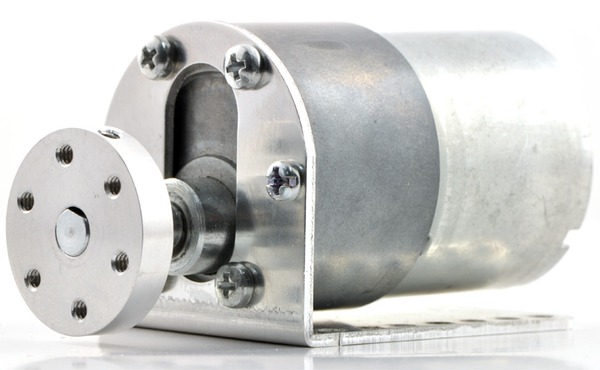
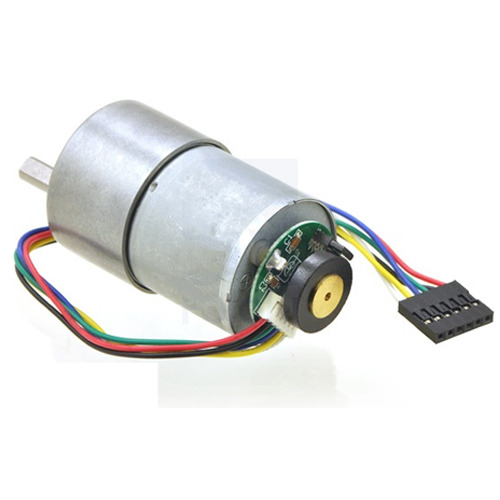
19:1 37D 금속 기어 모터
- 64 CPR인코더
- 19:1 Metal gear motor 37D
- 500 RPM
- 37Dx52L mm with 64 CPR encoder
- Torque: 84 oz-in
- stall: 5A
개요(19:1 37D 금속 기어 모터 - 64 CPR인코더)
- 본 제품은 원통형의 2.54" × 1.45" × 1.45" 크기의 기어 모터로
- 19:1의 감속기어를 채택하고 64 CPR 인코더를 내장한 12V용 모터입니다.
- 인코더는 한 회전당 64 카운트를 제공하여, 기어박스 출력 샤프트 한 회전당 1200 카운트를 제공합니다.
- 본 제품은 15.5mm길이, 6 mm 지름의 D 모양의 출력 샤프트를 가지고 있습니다.
- 핵심스펙: 12V: 500 RPM, 무부하 300 mA 전류소모, 토크: 84 oz-in (5 kg-cm), stall current: 5 A
37D 금속 기어 모터 제품군
- 강력한 파워를 가진 본 기어 모터 제품군은 다양한 종류의 감속기어비를 가진 제품들이 있습니다.
- 또한 quadrature encoder를 내장한 제품들이 있습니다.
- 아래의 제품 비교 섹션에서 어플리케이션에 맞는 모터를 찾아보십시오.
37D 금속기어 모터 한눈에 보기
| 감속 기어비 |
무부하 속도 @ 6 V |
Stall Torque @ 6 V |
Stall Current @ 6 V |
Encoder 장착 |
Encode 미장착 |
| 19:1 | 500 RPM | 84 oz-in | 5A | 19:1 37D 금속 기어 모터, 64 CPR encoder | 19:1 37D 금속 기어 모터 |
| 29:1 | 350 RPM | 110 oz-in | 5A | 29:1 37D 금속 기어 모터, 64 CPR encoder | 19:1 37D 금속 기어 모터 |
| 50:1 | 200 RPM | 170 oz-in | 5A | 50:1 37D 금속 기어 모터, 64 CPR encoder | 19:1 37D 금속 기어 모터 |
| 67:1 | 150 RPM | 200 oz-in | 5A | 67:1 37D 금속 기어 모터, 64 CPR encoder | 19:1 37D 금속 기어 모터 |
| 100:1 | 100 RPM | 220 oz-in | 5A | 100:1 37D 금속 기어 모터, 64 CPR encoder | 19:1 37D 금속 기어 모터 |
| 131:1 | 80 RPM | 250 oz-in | 5A | 131:1 37D 금속 기어 모터, 64 CPR encoder | 19:1 37D 금속 기어 모터 |
본 제품들은 12V에서 사용하기 위해 디자인 되었습니다. 6V에서 사용시 스펙값은 대략 절반가량으로 떨어집니다.
제품 도면

| 감속기어비 | 19:1 29:1 |
50:1 67:1 |
100:1 131:1 |
| X(mm) | 22 | 24 | 26.5 |
- 모터 전면부에는 여섯개의 마운팅 홀(M3 나사)이 동일한 간격(15.5mm)으로 위치하여 있습니다.
- 다른 작은 모터와는 다르게 37D 기어모터는 샤프트의 지름이 6mm입니다.
- 경고: 마운팅 홀에 나사를 깊게 체결하면 나사가 모터의 기어부분에 망가트릴 수 있습니다. 마운팅 홀에 3mm이상 나사를 넣어 체결하지 마십시오.
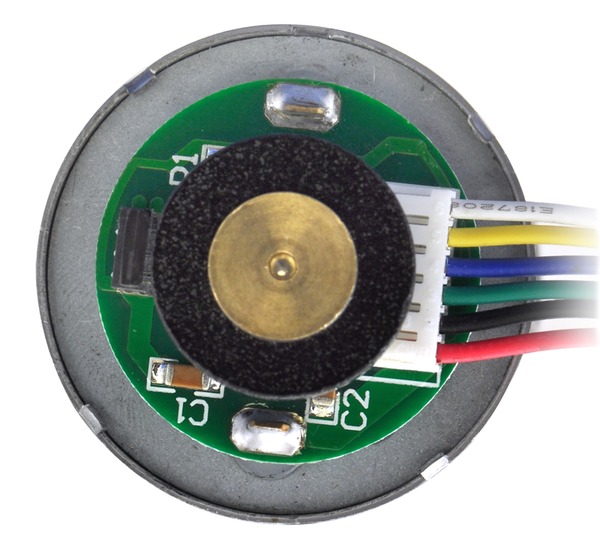
Encoder 사용하기
- 모터의 뒤쪽에 돌출한 샤프트에 있는 자석 디스크의 회전을 감지하기 위해 two-channel Hall effect encoder가 사용이 됩니다.
- 이 quadrature encoder는 두개 채널의 양 edge를 카운트할때, 모터 샤프트의 한 회전당 64 count 분해능을 제공합니다.
- 기어박스 출력 샤프트의 회전당 카운트를 계산하려면 감속기어비에 64를 곱하면 됩니다.
- 모터/인코더는 6개의 색을 가진 28센티 리드선을 가지고 있는데 전선의 끝에는 0.1인치 간격의 1x6 female 헤더가 있습니다.
- 아래는 각각의 선에 대한 설명입니다.
| 전선색 | 설명 | 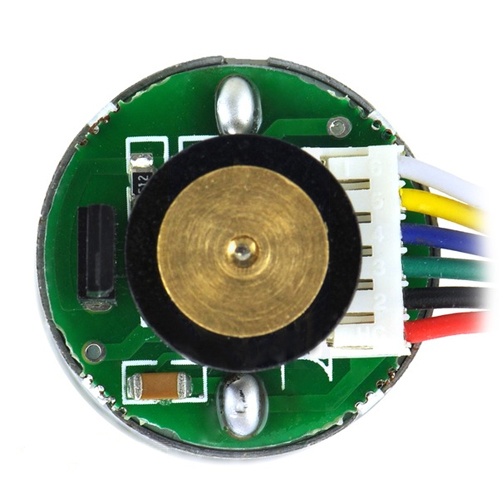 | |
| 빨강 | 모터 전원(모터의 터미널 한쪽에 연결됨) | ||
| 검정 | 모터 전원(모터의 다른 터미널 한쪽에 연결됨) | ||
| 초록 | encoder GND | ||
| 파랑 | encoder Vcc (3.5 – 20 V) | ||
| 노랑 | encoder A output | ||
| 흰색 | encoder B output | ||
- Hall sensor는 입력 전압(Vcc, 3.5~20V)를 필요로 하며 최대 10mA의 전류를 사용합니다.
- 인코더 출력 A,B는 0V~Vcc사이의 square wave 파형(approximately 90° out of phase)입니다.
- transition의 주파수로 모터의 속도를 알수 있으며, transition의 순서로 모터 회전 방향을 알수 있습니다.
- 아래의 오실로스코프 캡쳐 그림은 인코더 출력 A, B를 보여줍니다.
- 사용된 모터의 전압은 12V이며, Hall sensor의 Vcc는 5V입니다.
 |
| 64 CPR 인코더를 장착한 25D 금속기어모터의 인코더 A, B 출력 (모터 12V 사용) |
- A, B출력의 rising 과 falling edge를 카운팅함으로써 모터샤프트의 한회전 당 64 카운트를 얻는 것이 가능합니다.
- 한개의 채널의 한개의 edge만을 사용한다면 모터샤프트 한 회전당 16카운트를 얻을 수 있습니다.
- 그러므로 출력 A의 주파수는 모터 회전 주파수의 16배가 되게 됩니다.
제품크기 정보
- 크기: 37D x 64L mm
- 무게: 7.5 oz
- 샤프트 지름: 6 mm
- 샤프트 모양: D형
활용가능한 분야
- 로보틱스
- 전자제품
- RC장난감
- 도어락 등등