













 수량을 선택해주세요.
수량을 선택해주세요.


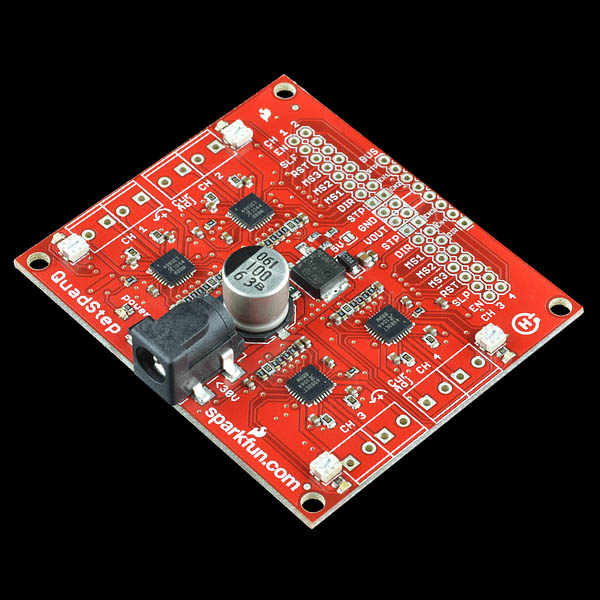
Quadstepper Motor Driver Board
(쿼드 스텝퍼 모터 드라이버 보드)
개요
- 쿼드 스텝퍼 모터 드라이버 보드는 로직레벨 I/O핀을 이용하여 총 4개까지의 바이폴라 스텝퍼 모터를 동시에 제어할 수 있게 하여줍니다
- 각각의 모터 드라이버는 35V/1A의 출력 드라이브를 가지고 있습니다.
- 보드는 모터를 full, half, quater, eight, sixteenth-step 모드로 동작시킬 수 있습니다.
- 점퍼를 이용하여 로직레벨은 3.3v 혹은 5v간 선택이 가능합니다.
- 버스 헤더는 4개의 모터를 오직 6개의 IO핀으로만 제어가 가능하게 하여줍니다. 이것은 각각의 모터의 EN핀을 제어를 통해 가능합니다. 버스헤더를 사용하기 위해서는 보드 뒷면의 'Bus Enable'점퍼를 모두 닫아주어야 합니다.
- 쿼드 스텝퍼 보드는 3D프린팅 어플리케이션과 로직레벨 IO핀을 이용한 정교한 움직임 제어가 필요한 어플리케이션에 사용이 가능합니다
Note: 보드가 이론적으로 모터당 2A씩 공급이 가능하지만, 적절하게 발생하는 열을 처리하지 않는다면 문제가 생길 수 있습니다. 보통의 경우 모터를 1A수준에서 드라이브 시킨다면 열처리 없이 사용이 가능합니다.
Note: 아두이노 라이브러리는 현재 Arduino Mega 혹은 Mega 2560에서만 지원합니다.
특징
- 4개의 바이폴라 스텝퍼 모터를 동시에 제어가능
- 각각의 모터는 8-35V/2A 출력 드라이브를 가짐
- 각각의 채널은 포텐티오미터를 사용하여 모터의 전류를 제어함
- full, half, quarter, eight, sixteenth-step mode로 모터 제어가 가능
- 전원 입력(barrel jack)은 30V 이하를 주어야하며 스텝퍼모터에 충분한 전류를 공급하여 주어야 함
- 점퍼(labeled "5V")는 모터 드라이버의 전원, 로직레벨, VOUT핀, 선택가능한 3.3/5V의 전원을 제어함
- 버스 헤더는 6개의 IO핀으로 4개의 모터를 제어할 수 있게 하여줌. 보드 뒷면의 EN 점퍼를 모두 닫아 주어야 함
- 2.1mm, center positive barrel jack
문서
- Schematic
- Eagle Files
- Datasheet (A4983SETTR-T)
- Arduino Library























