













 수량을 선택해주세요.
수량을 선택해주세요.


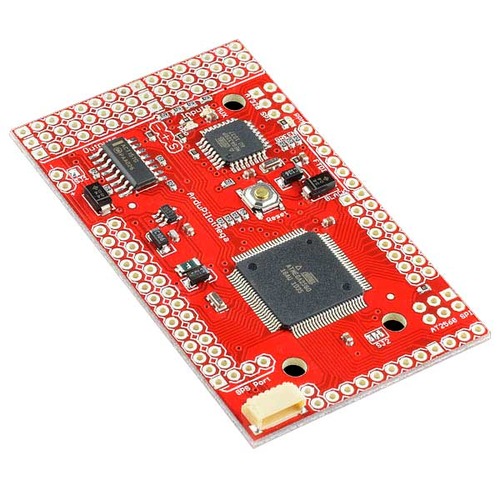
ArduPilot Mega
Arduino Mega compatible
UAV Controller
(아두파일럿 메가
아두이노 메가 호환 UAV 컨트롤러)
개요
- ArduPilot Mega는 제일 최신 버전의 autopilot 보드로 기존의 ATmega1280대신 ATmega2560을 장착하였습니다.
- ArduPilot Mega는 완전히 프로그래밍가능한 autopilot 보드로 UAV를 동작 시키기 위해서는 GPS모듈과 센서가 필요합니다.
- 본 제품은 stabilization과 navigation 둘다를 처리하기 때문에 별도의 stablilization시스템이 필요 없습니다.
- "fly-by-wire"모드를 또한 지원하여 RC컨트롤로 비행을 수동으로 제어할 시 비행체를 안정화 시켜 주어 쉽고 안전하게 비행하게 하여 줍니다.
- 하드웨어와 소프트웨어는 모두 오픈 소스입니다.
- 보드의 커넥터는 납땜이 필요할 수 있습니다.
- RC 프로세싱 펌웨어가 이미 로드되어 있지만 autopilot 소프트웨어는 사용자가 다운로드 받아 다시 보드에 올려야 합니다.
- Arduino IDE로 프로그래밍이 가능합니다.
특징
- 무인 항공기, 무인 자동차, 무인 보트 등과 사용되기 위해 디자인된 컨트롤러임
- 16Mhz Atmega2560 프로세서 채택
- 내장된 하드웨어 failsafe 기능은 별도의 회로(multiplexer chip과 Atmega328)를 사용하여 RC시스템과 autopilot과의 제어신호를 전송함. 비행중 메인 프로세서를 리부팅 시킬 수 있음.
- 32MIPS 파워의 듀얼 프로세서 디자인
- 3D waypoints 및 미션 명령 지원(메모리에 따라)
- 6핀 GPS커넥터 장착(EM406 style)
- 16개의 추가적인 아날로그 입력(각 채널 ADC 지원)과 40개의 추가적인 디지털 입출력 핀을 지원하여 센서들을 추가 가능
- 양방향 텔레메트리(Xbee모듈 옵션으로 사용)와 확장을 위한 4개의 전용 시리얼 포트
- RC리시버 혹은 별도의 배터리로 전원공급 가능
- 하드웨어 기반 서보 컨트롤로 프로세서에 부하를 적게 주며 빠른 반응 속도를 가짐. No Jitter
- 8개의 RC채널은 autopilot에 의해 프로세싱 가능 (autopilot on/off 채널 포함)
- 전원, failsafe상태, autopilot상태 및 GPS lock표시용 LED
- IMU, groundstation/mission planing code를 포함한 autopilot 소프트웨어 전부는 DIY Drones에서 받을 수 있음. 코드는 자동 이륙 및 착륙을 지원
문서
- Schematic
- Eagle Files
- Example Firmware - reads in 8 channels and outputs 8 channels
- Example Dancing Firmware - Video
- ArduPilot Project Homepage
- Software and instructions: DIY Drones Community























