













 수량을 선택해주세요.
수량을 선택해주세요.


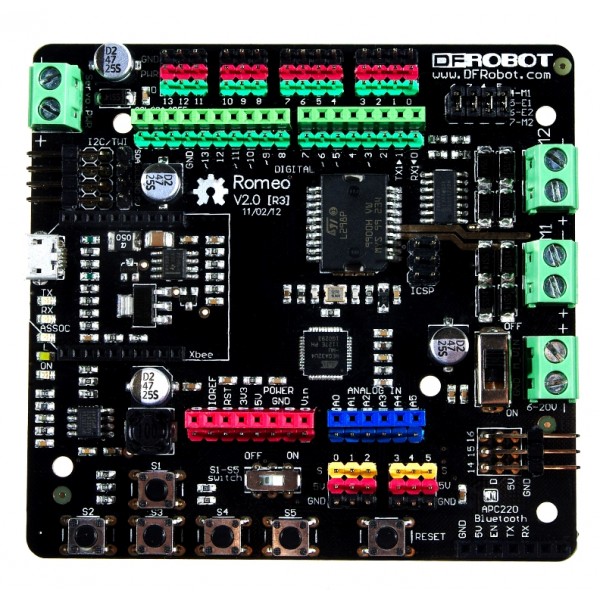
로메오 V2 올인원 로봇 컨트롤러 -아두이노 호환
(Romeo V2-All in one Controller)
개요
- 본 제품은 로메오 V2 올인원 아두이노 호환 로봇 컨트롤러입니다.
- Atmega32u4칩을 장착하고 있어 아두이노 레오나도 호환 보드이며, 양방향 DC모터(스텝모터) 드라이버와 Xbee소켓을 장착하고 있습니다.
- 또한 아두이노 쉴드의 사용이 용이하게 핀 아웃이 디자인 되었습니다.
- 아두이노 IDE를 통해 프로그래밍이 가능합니다.
- USB나 외부전원을 선택할 수 있는 전원 스위치가 장착되어 있습니다.
특징
- Wide operating input voltage
- Directly support Xbee and XBee form factor wifi, bluetooth and RF modules
- ON/ OFF switch to control the system power from external motor power
- 3 Digital I/O extensions (D14-D16)
- S1 - S5 switch replace jump cap, allows free use for the GPIO.
- Micro USB instead of A-B USB connector
- Analog sensor extension port: Orange for Signal, Red for Vcc, Black for GND
- Note:The analog sensor port pin mapping on RoMeo v2 is different from the old version. Please select Arduino Leonardo board when using Arduino IDE.
- DC Supply: USB Powered or External 6V ~ 23V DC
- DC Output: 5V(2A) / 3.3V DC
- Motor driver Continuous Output Current: 2A
- Microcontroller: ATmega32u4
- Bootloader: Arduino Leonardo
- Compatible with the Arduino R3 pin mapping
- Analog Inputs: A0-A5, A6 - A11 (on digital pins 4, 6, 8, 9, 10, and 12)
- PWM: 3, 5, 6, 9, 10, 11, and 13. Provide 8-bit PWM output
- 5 key inputs for testing
- Auto sensing/switching external power input
- Serial Interface
- TTL Level
- USB
- Support Male and Female Pin Header
- Built-in Xbee socket
- Integrated sockets for APC220 RF Module and DF-Bluetooth Module
- Three I2C/TWI Interface Pin Sets (two 90°pin headers)
- Two way Motor Driver with 2A maximum current
- One Stepper Motor Drive with 2A maximum current
- Size: 89 x 84 x 14mm
문서
- Wiki Doc
- Romeo V2 schematic
- Tips for changing the sensor cable pin mapping
- Drive Stepper motor with Romeo v2
- Romeo stepper motor library
- Raspberry Internet Rover(Based on Pirate 4WD platform and Romeo V2)
- Hongkong biped robot using Romeo
- Arduino RC Hack based on Romeo v1
- Android controlled time-lapse photography - Submitted by MakoShark2























