













 수량을 선택해주세요.
수량을 선택해주세요.


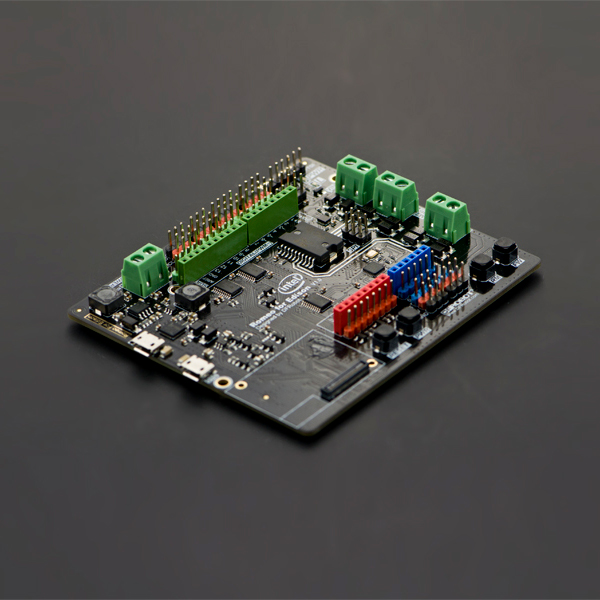
인텔 에디슨용 로메오 로봇 컨트롤러
(Romeo for Intel Edison Controller
(Without Intel® Edison))
개요
- 인텔 에디슨 용 로메오 보드는 다목적 올인원 개발 플랫폼입니다.
- 인텔 에디슨을 결합하여 사용하는 보드로 특별히 로봇 어플리케이션을 위해 디자인 되었습니다.
- 아두이노 플랫폼, 리눅스, 자바 및 C 개발환경을 지원하며, 기존의 아두이노 쉴드를 이용가능합니다.
- 보드에는 2 way DC 모터 드라이버가 내장되어 있습니다.
특징
- Operating Voltage: 5V
- Output Voltage: 5V/3.3V
- Input Voltage(limits): 6-20V
- Digital I/O pins: 14
- Analog I/O pins: 6
- DC Current per I/O Pin: 10mA
- Motor Driver Constant Current: 2 x 2A
- Size: 100x88x15mm
- Weight: 70g
- Support USB power and external power supply switch
- Support SPI program port
- Support 1 x I2C interface
- Support 2 way motor drive (Peak Current: 2A)
- Support Broadcom 43340 802.11 a/b/g/n dual band (2.4G and 5GHz) Wi-Fi
- Support Bluetooth 4.0
- Support OTG
- 14 Digital I/O pins
- 6 Analog I/O pins
- 4 PWM Output interfaces
- Romeo for Edison Controller (without Edison) x1
문서
- Wiki
- Romeo for Edison Schematic
- Romeo for Edison Motor and Analog Pins library
- Atmel mega8 firmware V1.1
- Intel Edison Getting Started Tutorial
- Edison Related Software Download
- Edison Firmware Update Tutorial
- Build your Own Edison System Image Tutorial
- Intel Edison Introduction
- Edison Module Introduction Webpage
- Edison Development Forum
연관제품
- 연관제품 1























